




 教育在线
教育在线



受天然肌肉的启发,人工肌肉近年来发展迅速,并有望应用于软体机器人、假肢、触觉界面和智能服装等领域。然而前人的研究主要集中于利用“自上而下”的工程化手段重复肌肉的刺激收缩功能,无法复制天然肌肉组织精细的多尺度结构,从而使得材料性能受到一定的限制。鉴于此,研究人员创新性地提出了基于嵌段聚合物自组装,通过模拟骨骼肌纤维的条纹结构制备人工肌肉的新策略。
自组装人工肌肉通过简单的两步法制备:首先利用快速注射将ABA三嵌段聚合物溶液注入水中触发自组装(图 1a,b),得到均匀的水凝胶纤维。第二步沿纤维轴向拉伸水凝胶,通过在不同应变下诱导PEO链段结晶得到低熵、高取向性的聚合物链状态。在外界刺激下,PEO晶体可以重新转变为非晶态,释放储存的机械能,产生致动行为。人工肌肉制备过程中没有向聚合物原料中引入任何新的化学交联或其他成分,因此将材料溶解在合适的溶剂中即可回收再利用。
中国教育在线 林剑 通讯员 华南理工软物质
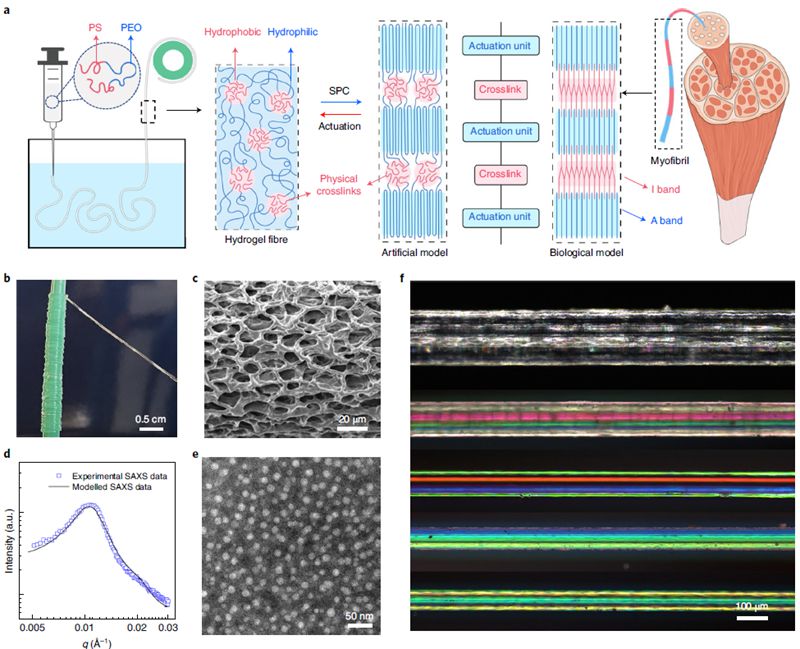
图1. 自组装水凝胶的可控应变结晶制备人工肌肉纤维。
高取向性的晶体结构在原有的水凝胶网络基础上,不但极大地增强了纤维的机械性能,同时赋予了人工肌肉优异的致动性能。例如,自组装人工肌肉可以在承载700倍自重的条件下,实现150%/s的高速致动。与近年来报道的其他人工肌肉相比,自组装人工肌肉在多个方面展示出了优异的表现(图2)。
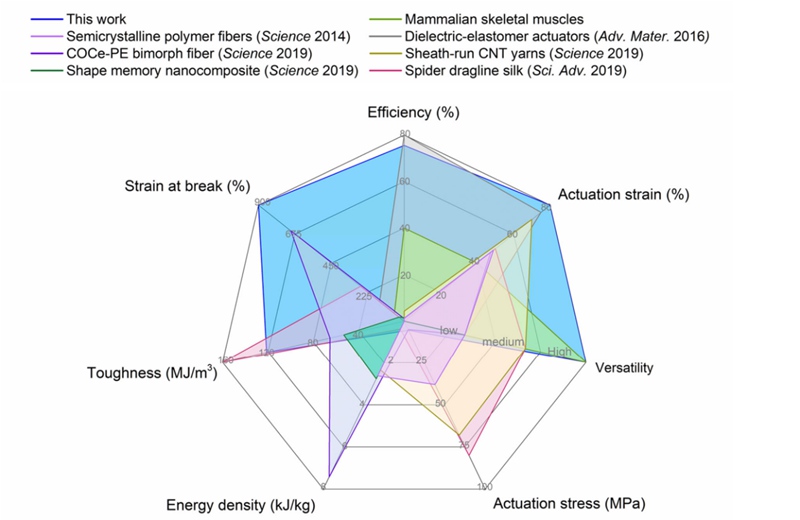
图2. 人工肌肉纤维表现出优异的机械和致动性能。
自组装人工肌肉具有良好的循环性和多重响应性。例如,变温可以驱动纤维可逆收缩(图 3a),而改变湿度则可以通过材料吸附实现纤维的可逆膨胀(图 3b)。当两种刺激同时使用,纤维可以根据需要产生收缩或扩张应力(图 3c,3d)。除了线性致动,研究团队还制备了螺旋型的转动致动器,可用于开发微型马达(图3e,3f)。该研究不但展示了一类可回收的高性能人工肌肉的制备,同时有望为开发具有多功能及不同性质的软体致动器提供新的灵感。

图3. 人工肌肉纤维的可逆和旋转致动行为。
Nanostructured block copolymer muscles
Chao Lang #, Elisabeth C.Lloyd, Kelly E.Matuszewski, Yifan Xu, Venkat Ganesan, Rui Huan1g, Manish Kumar, Robert J.Hickey*
Nature Nanotechnology, 2022, DOI:10.1038/s41565-022-01133-0
扫描二维码查看原文

① 凡本站注明“稿件来源:教育在线”的所有文字、图片和音视频稿件,版权均属本网所有,任何媒体、网站或个人未经本网协议授权不得转载、链接、转贴或以其他方式复制发表。已经本站协议授权的媒体、网站,在下载使用时必须注明“稿件来源:教育在线”,违者本站将依法追究责任。
② 本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者在两周内速来电或来函联系。